服务热线:010-66095089/13521200337



大赛报名|“雄才杯”2026创新创业大赛 项目征集

「为深化智慧城市建设,推广城市数字化转型先进经验,推动物联网技术与城市发展深度融合,赋能北京城市高质量发展、高效能治理与高品质生活,北京物联网智能技术应用协会、中关村智慧城市产业技术创新战略联盟、北京测绘学会在2025年全球数字经济大会物联网与智慧城市论坛期间,联合开展2025物联网与智慧城市优秀案例征集评选活动。本次活动共征集200余个案例/成果,经评审筛选,最终发布60个优秀案例/成果,并将通过多渠道进行系列展示。诚邀各界开展合作交流,详情可咨询北物联李老师(联系电话:13521200337)。」
CASE OVERVIEW
针对工业制造生产过程中复杂、无序、高频的零配件分拣及搬运问题,以实际场景应用需求为牵引,深入主机厂总装车间,搭建模拟训练测试场地,设计开发工业具身智能机器人平台。研究多智能体间的协作能力以及云端调度规划,研究工业具身机器人数据采集与模拟训练平台,研究基于强化学习的高适应性抓取算法,探索及优化机械臂灵巧手在动态环境下的抓取能力,提升抓取的智能化和适应性,让“智能”从自动式走向自主式、最终走向生成式,实现真正的人工智能。
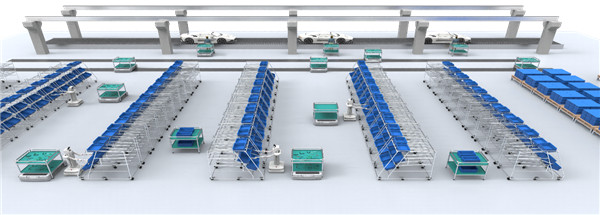
项目搭建工业具身智能机器人平台,实现复杂场景下的高效、精准及柔性化分拣搬运;面向工业制造、物流领域的智能化升级需求,加速机器人生成式能力提升,突破传统方式环境适应性弱、感知能力低、自主分析决策能力缺乏的瓶颈,解决人工效率低、传统自动化部署成本高及场景局限性大等行业痛点。下图为具身智能机器人在主机厂总装车间应用场景示意图。
项目平台已成功应用于工业制造、物流领域,助力企业降低人工成本、提升工业生产自动化部署能力,打破了机器人传统方式环境适应性差、感知决策能力不足的技术瓶颈,为行业智能化升级提供核心解决方案,具有显著的经济效益与广泛的应用推广价值。
INDUSTRY CHALLENGES
传统工业制造领域,零件分拣及搬运主要依赖人工和基础自动化设备来完成。人工分拣搬运具有较强的灵活性和适应性,能够处理各种形状、尺寸的零件,且初期投入相对较低;然而长时间作业带来的疲劳度、注意力分散等因素,导致工作效率相对较低、出错率增加;另外,人口老龄化引发的劳动力供给不足、生产率降低的用工难题,亟需科技手段解决。传统自动化工业机械臂,通常采用示教或离线编程的方式,使其按照预定的轨迹和动作进行分拣搬运,一定程度上提高了自动化程度及工作效率;然而这种方式对环境的感知能力较低,无法确定其所处的环境,且不具备自主识别物料、主动分析应执行何种作业方式的能力,有一定的局限性。
随着科技的发展,涌现出一种由自动式到自主式、生成式的工业具身智能机器人技术,机器人正从单一任务执行向具备自主决策能力的智能体转变。
SOLUTIONS AND SCENARIOS
项目突破以下核心技术:
(1)自研操作系统
自研适配服务机器人的专用实时操作系统,在实时内核基础上优化了服务机器人中间件,解决了系统CPU、内存等资源分散问题。
(2)大面积高动态定位导航算法
在车站、机场等超大面积、复杂多变、人员密集的场景下,全程实现厘米级定位精度。自研多传感器融合算法,对动态物体进行估计和预测,自适应调速、优化路径,安全通行。
(3)云端智能调度
多智能体同时运行、狭窄、电梯闸机等资源有限的情况下,结合云端路网调度信息和机器人间的通信,实现智能通行;结合机器人的位置、状态信息,智能调度最优机器人。
(4)端到端任务
大语言模型与机器人控制的结合,使机器人能够理解自然语言指令并分解任务步骤。端到端模型(如VLA)直接将人类指令映射为机器人控制动作,简化操作复杂性。
(5)数据采集
利用高分辨率、多类型相机的采集平台,采用关键点和三维Mesh模型自动标注,解决强光、闪光、快速运动问题,形成了大规模、多模态真实手势数据集,突破具身智能场景下的数据约束,为智能体的学习、验证和优化赋能。
(6)多模态感知识别
构建视觉感知+触觉反馈的多模态感知融合技术,开发亚毫米级物体位姿估计算法和触觉-视觉联合标定模型。
(7)动态抓取
研发动态抓取策略库,能够适应平行夹持、包络抓取、吸盘混合控制等多种抓取模式,支持不规则物体快速匹配。
(8)手势理解与交互技术
基于物理渲染技术的手势合成图像数据集生成,增加数据多样性和解决标准困难的缺陷。构建具身智能大模型,为智能体提供强大的知识表示、推理能力和多模态理解能力,综合提升智能体的学习效率、任务规划能力和人机交互功能。
当前主要聚焦汽车行业和物流行业两大领域深挖工业具身智能机器人应用场景:
(1)总装车间零件分拣搬运
在汽车、3C等行业的零件或物料转运场景,其作业过程:根据信息系统输出的零件配料信息,将一台车份的零件配载到相应的料车上,利用AGV物料传输系统托运,按需求的时间送至生产线指定工位,料车在线随对应生产车辆同步行进,配料车内零件全部装配完毕后,在指定工位撤出并进入下一循环。
可扩展到高位环境的物资运输场景,如核电站、化工厂等。
(2)动态物流及仓储管理
在电商或工厂的智能仓储场景中,订单分拣是核心环节之一。具身智能机器人通过视觉识别和深度学习算法,快速识别商品并完成分拣任务。通过3D视觉相机扫描货架上的商品,结合AI算法判断商品种类和位置,使用机械臂抓取并放入指定订单箱中。
SUMMARY OF EFFECTIVENESS AND VALUE
(3)应对未来挑战与机遇。在未来,工业制造领域将面临更加复杂和多变的环境与挑战,项目的实施有利于提升工业具身机器人对环境的适应能力和应对能力,抢占市场先机,迎接机遇,推动产业发展。
|

